مولتی بادی یکی از جدیدترین محیط های سیمولینک است که می تواند از عهده تحلیل ها و طراحی های دینامیکی به خوبی برآید و به ارتقای کیفیت مکانیزم ها و سیستم های مکانیکی کمک زیادی کند. برای آشنایی بیشتر با این محیط بسیار پرکاربرد اما ناشناخته، با ما همراه باشید.
سایر آموزش های مرتبط با متلب و سیمولینک را هم در این بخش ببینید!
برای طراحی هر مکانیزمی که از چند جسم (لینک) و مفصل های بین آنها تشکیل شده باشد، یکی از گام های اساسی، تحلیل دینامیکی ( شامل سینماتیک و سینتیک) سیستم است.
مثلا برای تحلیل سینماتیکی، فرض کنید یک مکانیزم چهار میله ای داریم و قصد داریم با اتصال یک موتور به ابتدای زنجیره و به حرکت در آوردن آن با یک سرعت مشخص، سرعت دورانی لینک انتهایی را بدست آوریم. یا مثلا فرض کنید یک ربات داریم که از سه لینک اصلی تشکیل شده است. این سه لینک توسط سه مفصل به هم و به زمین متصل شده اند. با استفاده از تحلیل سینماتیکی می توانیم بفهمیم اگر هر کدام از مفاصل دورانی به اندازه مشخص دوران کنند، قسمت انتهایی ربات ( end effector) چه مقدار و با چه سرعتی جابجا می شود.
حالا فرض کنید برای برداشتن یک جسم، به انتهای لینک آخر ربات، نیرو و گشتاور مشخصی وارد شود. برای انتخاب موتور ها باید بدانیم در هر مفصل چه نیرو و گشتاوری باید توسط موتور تحمل شود. برای این کار ( پیدا کردن گشتاور های ایجاد شده در هر مفصل، در نتیجه ی گشتاور و نیروی وارد شده بر لینک انتهایی) نیاز به تحلیل سینتیکی مکانیزم داریم.
پس به طور کلی می توان گفت برای طراحی هر مکانیزمی، یک گام بسیار مهم و حیاتی، تحلیل و طراحی دینامیکی آن مکانیزم است. یکی از بهترین ابزار برای این تحلیل ها نرم افزار متلب است. با استفاده از کدنویسی در متلب می توانیم مکانیزم ها را با دقت بسیار خوبی تحلیل کنیم و حتی منطق کنترلی آنها را هم بدست آوریم و کنترل کننده های متنوعی را با توجه به شرایط طراحی کنیم.
اما کدنویسی همیشه کاری نسبتا پر زحمت و وقت گیر است که به دانش برنامه نویسی بالایی نیز نیاز دارد. ( هر چند در صورت تسلط، بسیار ابزار مفیدی است و می تواند انعطاف بالایی به تحلیل ها بدهد.) یک پیشنهاد خوب استفاده از سیمولینک است. سیمولینک بخشی از نرم افزار متلب است که در آن بدون نیاز به کدنویسی و صرفا با انتخاب تعدادی بلوک و اتصال آنها به هم می توانیم خودمان را از دردسرهای کدنویسی خلاص کنیم.
در محیط سیمولینک، کتابخانه های مختلفی وجود دارد که هر کدام برای اهداف خاصی طراحی شده اند. هر کتابخانه شامل تعدادی بلوک است. یکی از بخش های سیمولینک که با تحلیل های مکانیکی و دینامیکی ارتباط دارد، بخش مولتی بادی Multibody از زیر مجموعه Simscape است. این بخش در سال های اخیر به متلب اضافه شده است و جایگزین Simmechanic شده است که در گذشته در بین مهندسان مکانیک و کنترل و رباتیک، محبوبیت فراوانی داشت. مولتی بادی فضایی به مراتب قوی تر و کاربرپسند تر نسبت به سیم مکانیک برای کاربر فراهم کرده است.
برای اینکه با قدرت و اهمیت مولتی بادی بیشتر آشنا شوید، به بیان تعدادی از قابلیت های فوق العاده آن می پردازیم.
در این محیط می توانیم بدنه و اجزای مکانیزم ها را در خود سیمولینک ایجاد نماییم و یا اینکه از سایر نرم افزارها مثل SolidWorks به داخل مولتی بادی import کنیم. با استفاده از بلوک های مختلف می توانیم انواع مفصل ها، نیروها، گشتاورها و … ایجاد کنیم و با نصب سنسورهای مختلف در قسمت های دلخواه از مکانیزم، پارامترهای مورد نیازمان ( مثل موقعیت، سرعت، شتاب، نیرو و …) را در جهت های مختلف محاسبه کنیم. همچنین می توانیم خروجی های سنسور ها را در قالب نمودارهایی در طول زمان نمایش دهیم. قابلیت فوق العاده خوب مولتی بادی، توانایی آن جهت نمایش سه بعدی انیمیشن حرکت های مکانیزم در هنگام شبیه سازی است.
یک مزیت بزرگ سیمولینک این است که نیازی نیست برای انجام یک پروژه مکانیکی و دینامکی خودمان را فقط به مولتی بادی محدود کنیم. بلکه می توانیم از المان های پر تعدادی که در سایر بخش های کتابخانه سیمولینک قرار دارند هم استفاده کنیم.
از محیط مولتی بادی می توانیم جهت شبیه سازی حرکتی و تحلیل مکانیزم ها و ربات ها، تحلیل ارتعاشی سیستم های تعلیق ، شبیه سازی و تحلیل سیستم های اتوماسیون صنعتی و … استفاده کنیم.
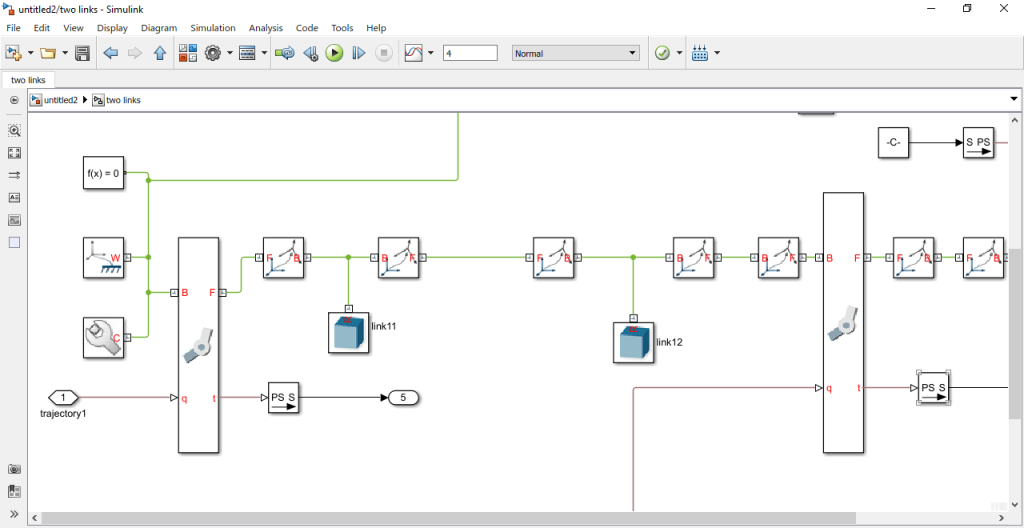
تصویر زیر نمایی از محیط نرم افزار را نشان می دهد و همان طور که مشاهده می کنید با اتصال بلوک ها به یکدیگر، یک سیستم مکانیکی شبیه سازی شده است.
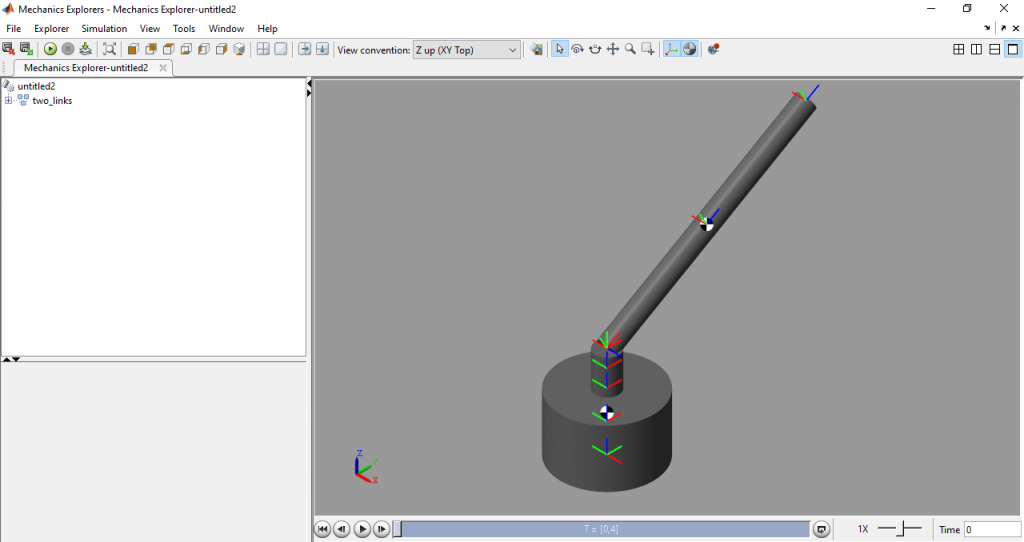
همان طور که پیش از این گفته شد، یکی از مزیت های بزرگ محیط مولتی بادی، توانایی ایجاد انیمیشن در هنگام شبیه سازی سیستم است. در تصویر زیر، تصویری از ایجاد انیمیشن یک مکانیزم بسیار ساده را مشاهده می کنید.
لینک های مفید:




