در مقاله قبلی انواع ربات ها را با توجه به حوزه ای که در آن کاربرد دارند، به هفت دسته تقسیم کردیم. اگر آن مقاله را مطالعه نکرده اید، توصیه می کنم حتما آن را در اینجا مطالعه کنید.
در این قسمت قصد داریم انواع ربات ها را طبق معیار دیگری دسته بندی کنیم. معیاری که در این مقاله انتخاب کرده ایم، نحوه عملکرد و فناوری های به کار رفته در ربات های مختلف است.
سایر آموزش های کنترل و رباتیک را در این بخش ببینید!
طبق این معیار، ربات ها را در 6 دسته کلی قرار می دهیم:
1- ربات های بازویی
2- ربات های متحرک
3- ربات های هوایی یا آبی
4- ربات های انسان نما
5- نانو ربات ها و میکرو ربات ها
6- ربات های نرم
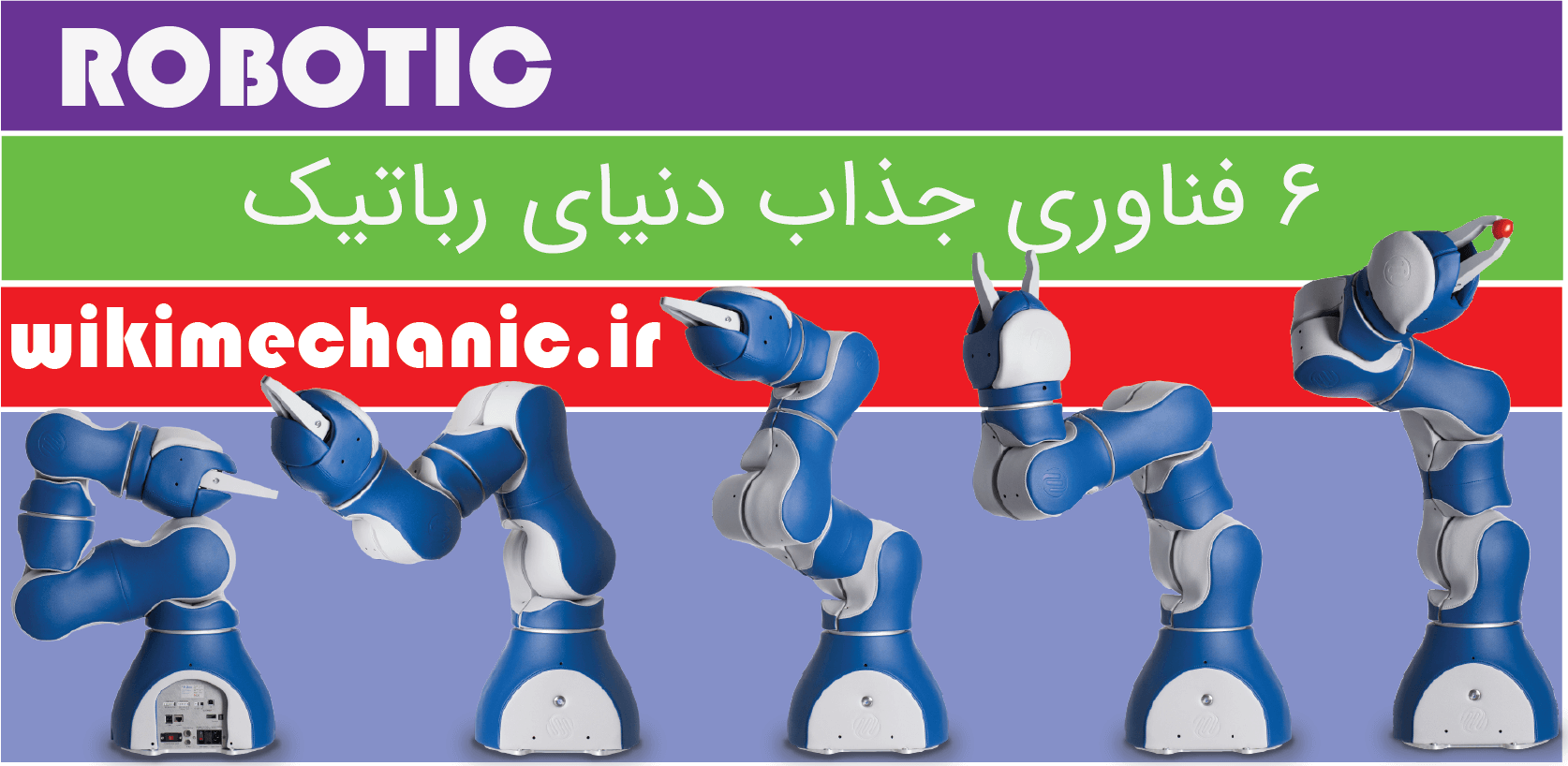
1- ربات های بازویی:
این ربات ها از چند لینک تشکیل شده اند که توسط مفصل هایی در بینشان به یکدیگر متصل می شوند. جزو قدیمی ترین دسته ها هستند و البته هنوز هم در دنیای فعلی، بیشترین کاربرد را دارند. استفاده از این ساختار می تواند در حوزه های گوناگون کاربرد داشته باشد و نیاز های ما را برآورده کند.

از معروف ترین شرکت های دنیا که در این زمینه فعالیت می کنند، می توانیم به شرکت های «کوکا» و «یونیورسال ربات» اشاره کنیم.
2- ربات های متحرک یا موبایل (mobile robot) :
این ربات ها قابلیت حرکت دارند و در یک جا بند نمی شوند! اما وسیله حرکت این ربات ها چیست؟ هر چیزی که بتواند آنها را از جایی به جای دیگر منتقل کند. این وسیله می تواند چند چرخ ساده باشد و یا اینکه چند پای شبیه سازی شده که به بدنه ربات متصل هستند.
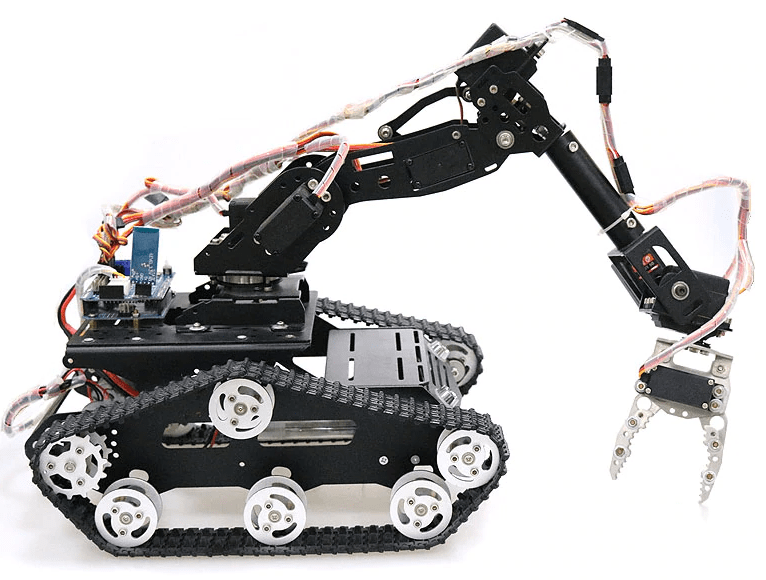
در این ربات ها مسیریابی و تشخیص موانع اهمیت بالایی دارد. مثلا ربات باید بتواند تشخیص بدهد که در مقابلش یک دیوار است و بتواند راه خود را کج کند. البته در ربات های ساده تر این دسته، ممکن است تغییر مسیر توسط ربات شناسایی نشود و وظیفه انجام آن بر دوش اپراتوری که آن را هدایت می کند باشد.
در ربات هایی که از روی موجودات زنده شبیه سازی شده اند و مانند آنها راه می روند، طراحی و ساخت پا و همچنین شبیه سازی راه رفتن و هماهنگی پاهای مختلف ( 2 پا یا 4 پا) چالش های بزرگی هستند. مثلا ربات زیر که از روی سگ شبیه سازی شده و با استفاده از چهار پا راه می رود. این ربات همان رباتی است که در مقاله قبلی هم به آن اشاره کردیم و گفتیم که توسط شرکت Boston Dynamics و به سفارش «دارپا» ساخته شده است.
3- ربات های هوایی یا آبی:
در این دسته از ربات ها، از آنجایی که ربات با یک سیال در تماس است، ملاحظات خاصی وجود دارد و محاسبات سیالاتی یا ایرودینامیکی هم به کار طراحی ربات اضافه می شوند.

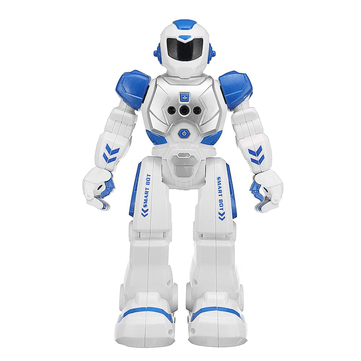
4- ربات های انسان نما:
در این ربات ها، علاوه بر اینکه محاسبات دینامیکی بسیار پیچیده ای مورد نیاز است، ظاهر ربات هم اهمیت بسیار زیادی پیدا می کند. مثلا موتورهایی که قرار است در مفاصل متصل شوند و لینک ها را به حرکت دربیاورند، نباید پیدا باشند و باید آنها را به نحوی پوشاند. بنابر وظیفه ای که ربات دارد، هوش مصنوعی هم در این ربات ها از اهمیت قابل ملاحظه ای برخوردار خواهد بود.
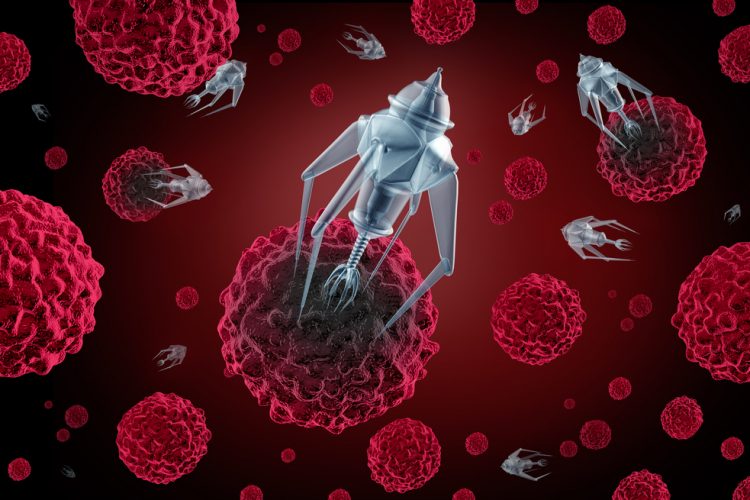
5- نانو ربات ها و میکرو ربات ها:
این ربات ها هیچ تشابهی به آنچه که در ذهن شما درباره ربات وجود دارد، ندارند. اصلا مگر ذره ای با ابعاد چند نانومتر یا میکرومتر، می تواند دارای چند لینک و مفصل و موتور و … باشد؟! این ربات ها بیشتر در کاربردهای پزشکی استفاده می شوند و نحوه عملکرد آنها به این گونه است که تعداد زیادی نانو ربات (یا میکرو ربات) وارد بدن انسان می شوند. سپس با استفاده از ایجاد میدان مغناطیسی این ربات ها کنترل می شوند تا به نقطه مقصد برسند. نقطه مقصد مثلا می تواند یک غده سرطانی باشد که نانو ربات ها از طریق میدان مغناطیسی خارجی به صورتی کنترل می شوند که غده را جدا کنند و سپس آن را از بدن خارج سازند. این شاخه از رباتیک، بسیار جدید است و در حال پیشرفت می باشد.
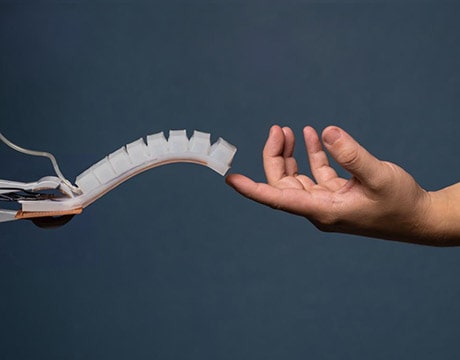
6- ربات ها نرم (soft robots):
«نرم بودن» در این ربات ها از دو منظر بیان می شود. منظر اول به خود ربات اشاره دارد که صلب نیست و دارای لینک های قابل انعطاف است. منظر دوم به جسمی که ربات با آن سر و کار دارد اشاره می کند. مثلا ربات هایی که در زمینه کشاورزی استفاده می شوند، دارای لینک های سفت و صلب هستند اما با جسم های نرم (میوه ها) سر و کار دارند و باید طوری با آنها برخورد کنند که آسیب نبینند و له نشوند!
این حوزه جزو جدید ترین و پیشرفته ترین حوزه های رباتیک است که در حال حاظر در حال توسعه می باشد.

