انجام پروژه در مولتی بادی – در مقاله های قبلی به یک معرفی اجمالی درباره محیط مولتی بادی سیمولینک پرداختیم و گام های اولیه ایجاد یک پروژه در مولتی بادی را معرفی کردیم. اگر آن مقاله ها را مطالعه نکردید، می توانید از لینک های زیر استفاده کنید.
«محیط مولتی بادی»؛ ابزار فوق العاده شبیه سازی مکانیکی در سیمولینک
گام اول؛ آغاز کار با مولتی بادی سیمولینک
سایر آموزش های مرتبط با متلب و سیمولینک را هم در این بخش ببینید!
در این قسمت از آموزش قصد داریم یک پروژه کامل را ارائه کنیم و به بررسی کلیت آن بپردازیم. این موضوع به شما کمک می کند تا به خوبی متوجه شوید برای انجام پروژه چه مسیری را باید طی کنید. همچنین در هر مرحله از مراحل بعدی آموزش، می دانید که در کدام پله قرار دارید و این می تواند کمک بسیار زیادی به شما بکند. بنابراین توصیه می کنم این آموزش را جدی بگیرید!
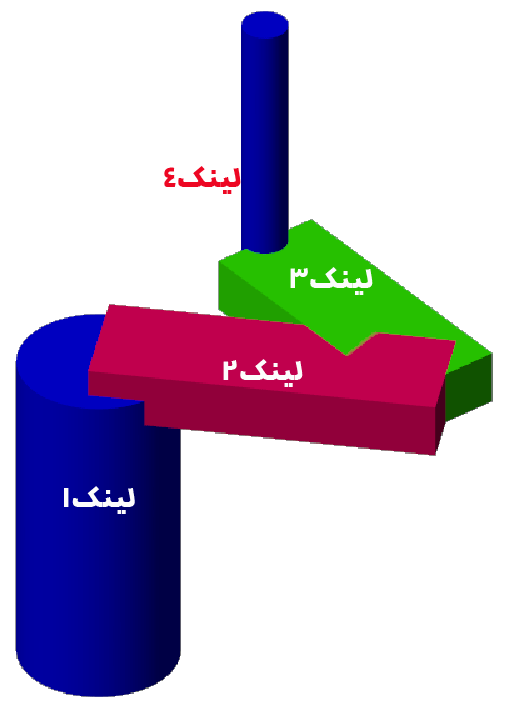
قبل از هر چیز باید به این نکته اشاره کنم که مولتی بادی قابلیت شبیه سازی و تحلیل پروژه های بسیار پیشرفته را دارد. حتی می توانید یک مدل را در سالیدورک طراحی کنید و سپس آن را به داخل مولتی بادی بیاورید و شبیه سازی ها و تحلیل های مورد نظرتان را روی آن اعمال نمایید. در این آموزش یک پروژه نه چندان پیچیده از شبیه سازی یک ربات سه لینکی آورده ایم. این پروژه برای شروع می تواند بسیار مناسب باشد. این را گفتم که از سادگی پروژه جا نخورید و نسبت به مولتی بادی بدبین نشوید!
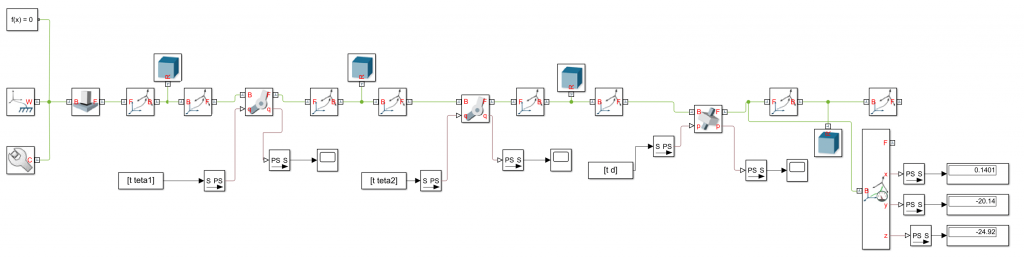
خب بدون مقدمه اضافی برویم سراغ اصل مطلب. تصویر زیر نمایی از پروژه نهایی و نحوه اتصال بلوک ها را نشان می دهد.
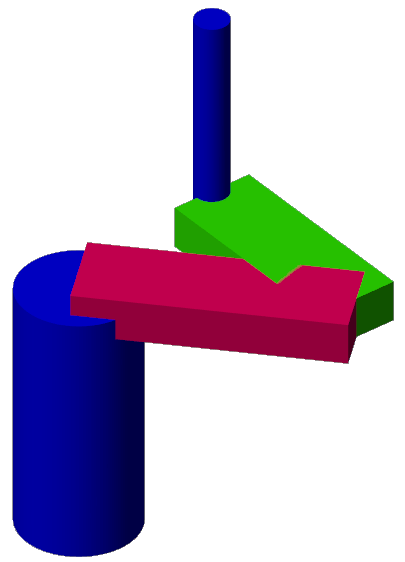
در نتیجه ی انجام پروژه به شکل بالا، مدل زیر ایجاد می شود. در این حالت یک انیمیشن از حرکت مدل به ما نشان داده می شود.
اما هر قسمت از پروژه با چه هدفی ایجاد شده و یا به بیان بهتر، هر دسته از بلوک ها چه وظیفه ای در این پروژه دارند؟ در تصویر زیر، کل بلوک ها را به قسمت تقسیم کرده ایم و در ادامه هر قسمت را کامل توضیح خواهیم داد.
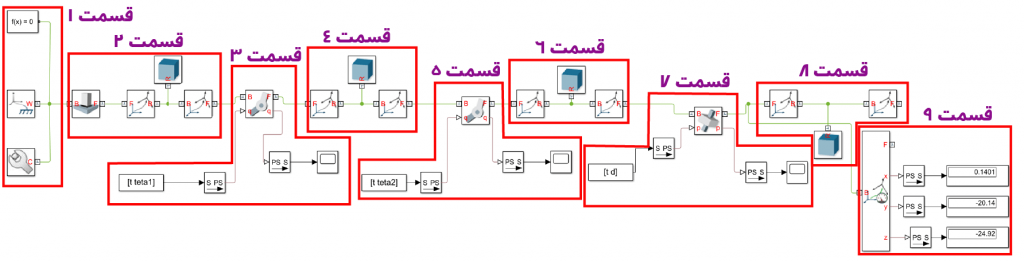
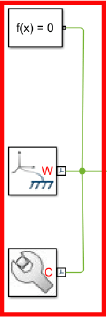
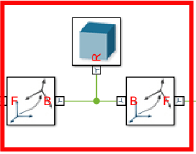
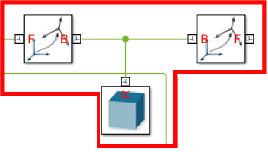
قسمت 1:
این قسمت شامل سه بلوک اصلی می شود که در هر پروژه مولتی بادی باید در ابتدای هر زنجیره دینامیکی قرار بگیرد. توضیحات دقیق تر این بلوک ها در آموزش گام اول؛ آغاز کار با مولتی بادی سیمولینک داده شده است.
قسمت 2:
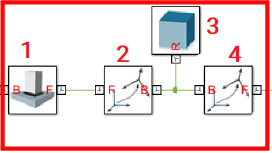
در این قسمت، لینک اول ربات را ایجاد کرده ایم. در بلوک 3 یعنی بلوک Solid مشخصات لینک را تعیین کرده ایم. شکل استوانه ای لینک، ابعاد استوانه، رنگ آبی آن و … در تنظیمات این بلوک اعمال شده اند. در واقع بلوک 3 لینک اول را برای ما تولید کرده است. ( در گام اول؛ آغاز کار با مولتی بادی سیمولینک به آموزش نحوه کار با این بلوک پرداخته ایم.)
بلوک 2، یک دستگاه مختصات در انتهای پایینی لینک 1 ایجاد کرده است تا در آن نقطه لینک را به زمین متصل کنیم. بلوک 4 هم یک دستگاه مختصات در انتهای بالایی لینک ایجاد کرده است تا لینک دوم را در آن نقطه بتوانیم به لینک 1 متصل کنیم.
بلوک 1 یک مفصل جوش است (weld joint) که همانطور که مشاهده می کنید انتهای پایینی لینک 1 را به زمین متصل می کند و باعث می شود این لینک کاملا ثابت شود.
پس تا اینجا لینک اول و مفصل آن ایجاد شد.
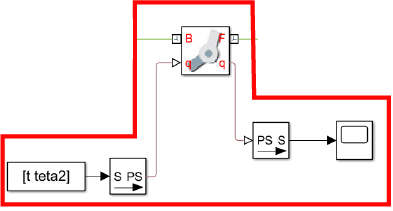
قسمت 3:
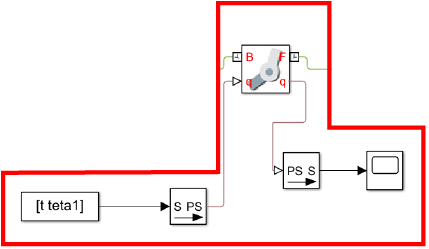
در این قسمت از انجام پروژه در مولتی بادی باید لینک دوم را به لینک اول اتصال دهیم. این اتصال توسط یک مفصل دورانی انجام می شود که بلوک آن را مشاهده می کنید. همانطور که مشخص است این بلوک یک خروجی و یک ورودی دارد. مثلا ورودی می تواند یک تابع باشد که نحوه حرکت و سرعت و شتاب دوران لینک را تعیین کند. در اینجا، تابع در نرم افزار متلب تعریف شده و به عنوان ورودی به این بلوک وارد شده است. خروجی هم مقدار یک پارامتر خاص را در هر زمان برای ما مشخص می کند. مثلا گشتاوری که در هر زمان بر مفصل وارد می شود. در آموزش های بعدی به طور مفصل درباره نحوه دادن ورودی و گرفتن خروجی بحث خواهیم کرد.
قسمت 4:
در این قسمت لینک دوم ایجاد شده. همانطور که در تصویر مشخص است، دو دستگاه مختصات در دو انتهای لینک ایجاد شده که یکی از آنها برای اتصال به لینک 1 و دیگری برای اتصال به لینک 3 است.
قسمت 5:
یک مفصل دورانی دیگر مانند قسمت 3. این مفصل دورانی لینک 2 و 3 را به هم متصل می کند.
قسمت6:
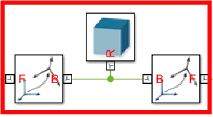
مشخصات لینک سوم در این قسمت تنظیم شده است.
قسمت7:
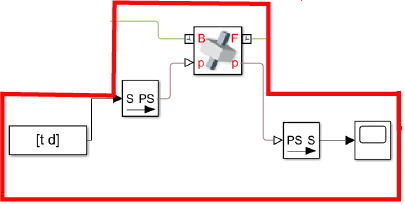
این قسمت یک مفصل دیگر را نشان می دهد که بین لینک 3 و 4 قرار می گیرد. از آنجایی که لینک 4 نسبت به لینک 3 یک حرکت خطی دارد، از مفصل خطی یا همان پریسماتیک (prismatic joint) استفاده می کنیم.
قسمت8:
در این قسمت لینک چهارم ایجاد شده است که همان عملگر نهایی است.
قسمت9:
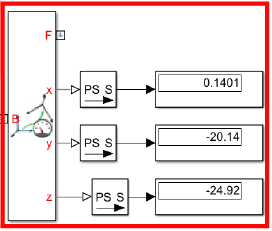
در مولتی بادی می توانیم پارامترهایی مانند موقعیت، سرعت، شتاب و … را در هر نقطه از مدل در طول زمان اندازه بگیریم. در این قسمت هم موقعیت انتهای پایینی مدل (به محل اتصال بلوک ها دقت کنید) یعنی x و y و z مربوطه را در هر زمان به دست آورده ایم.
پس در این پروژه به صورت کلی یک مکانیزم یا ربات چهار لینکی ایجاد کردیم، به مفاصل حرکت دادیم، و موقعیت عملگر نهایی را در اثر این حرکت ها در هر لحظه به دست آوردیم. امکانات دیگری هم می شد به این پروژه اضافه کرد. امکاناتی مانند وارد شدن نیرو و گشتاور، فنر و دمپر و …
تا اینجا با کلیت چگونگی انجام پروژه در مولتی بادی آشنا شدید. توضیحات مفصل هر قسمت بماند برای آموزش های بعدی. اگر سوال و یا ابهامی درباره این آموزش دارید، حتما در بخش نظرات بنویسید تا در سریع ترین زمان به شما پاسخ دهیم.
لینک های مفید:
سایت رسمی MathWorks شرکت سازنده نرم افزار متلب




